人型協働ロボット

ウェーハ検査ロボット
ウェーハ検査からオペレーターを解放!
手動型ウェーハ測定機×人型協働ロボットの活用提案
|
人型協働ロボットでのウェーハ交換作業動画を下記からご覧いただけます |
|
アプリケーション提案
人型協働ロボット×手動型ウェーハ測定機のコラボレーション
|
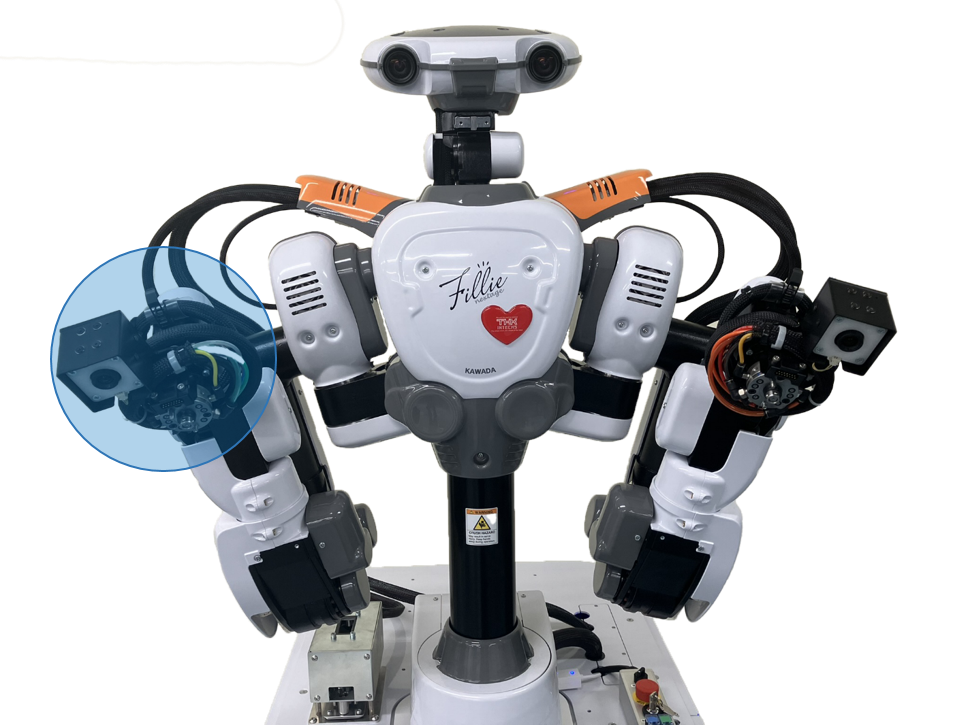
人型協働ロボット NEXTAGE |
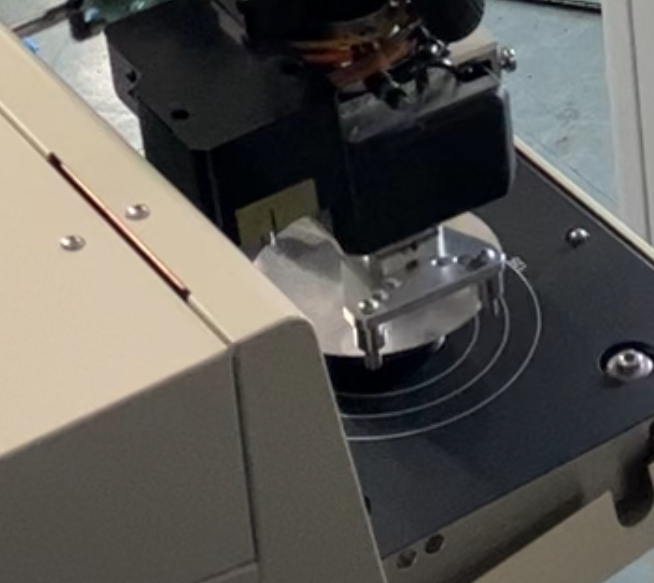
フラットネステスター FT-17 |
|
|
|
||
|
※NEXTAGEはカワダロボティクス(株)製品 |
上記数値は実測値となり、実測時条件は下記となります。 |
|

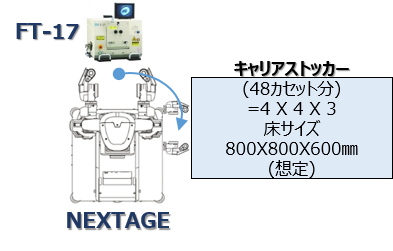
拡張提案
24h仕様
48カセット分の自動測定が可能(ウェーハ:1,200枚)
※60sec / 1ウェーハ+αで計算
|
|
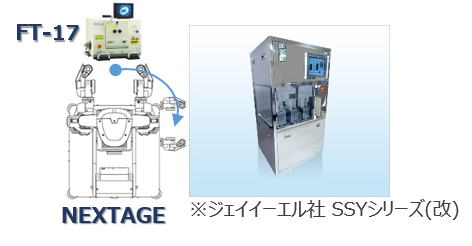
大容量・高速化・クリーン化仕様
ウェーハ・ロード/アンロードシステム
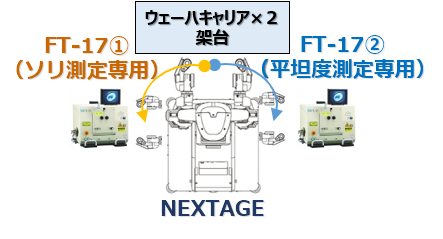
ソリ測定・平坦度 同時測定
FT-17×2台で測定を専用化し運用
※84.8min 48枚/2キャリア(実測値から想定)
|
|
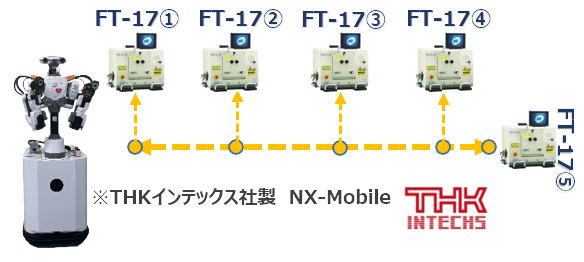
ロボット1台で複数台の測定機をカバー
AMR(自律走行搬送ロボット)タイプで装置間を移動し運用
|
|
NEXTAGE専用クリーンスーツ
(株)ガードナー製 NEXTAGE専用クリーンスーツ(発塵データあり)
|
|

人型協働ロボット活用 ≠ 専用全自動装置導入
■カスタマーメリット
|
24時間無人稼動 (検査員の負荷軽減) (要員不足解消) |
ウェーハ測定→ウェーハ交換 繰り返し単純作業をロボットで実現 ※検査員の単純作業を人型協働ロボットが代行 ※オプションを含め24h連続稼働を想定 |
|---|---|
|
既存の手動測定機をほぼ自動機に |
既存機は基本的に改造不要 |
|
ウェーハ増産計画に貢献 |
キャリアストッカー/AMRなど豊富なオプションを用意 |
|
お財布と人に優しく (投資/労務コストの低減) |
規格ロボット+αで作業用アプリケーションをトータルで提供 |
|
ロボットは他用途に転用可能 |
新たな作業用のアプリケーションにも転用可能ですので、長期間に渡り投資効果が期待できます |
【NEXTAGEが対応困難な作業】
a : ソリ/平坦度測定切り替え時のステージ交換とロボットのモード切替
b : 測定ウェーハ厚みの変更やバラツキに伴う「縞感度校正」
c : ウェーハ/キャリアサイズ切替時のステージ交換とロボットのモード切替
注:当ページで紹介している内容は、コンセプトを示すものであり、実際の製品化の仕様・性能などと内容が異なる場合がございます。
ウェーハ検査ロボットの主な機能と役割のご紹介
|
※上記NEXTAGEの左右腕部の画像はカスタマイズ前のノーマル状態です。 |
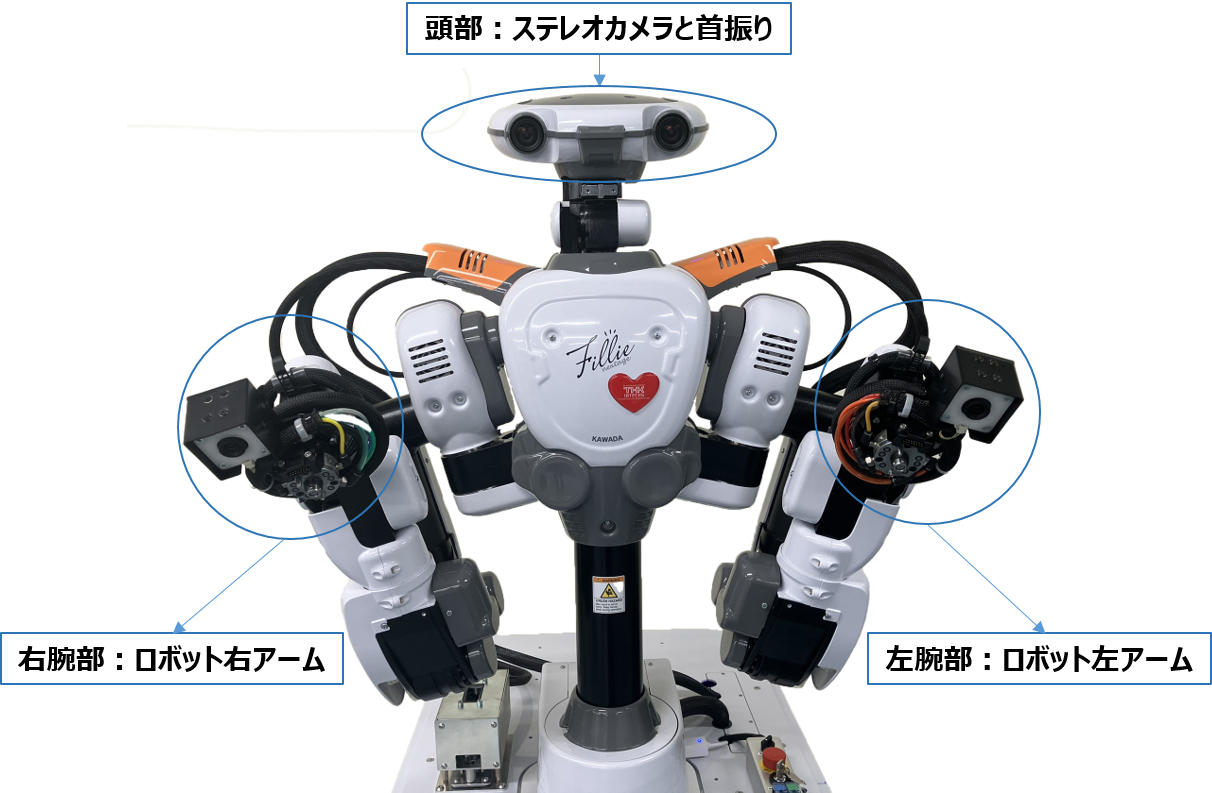
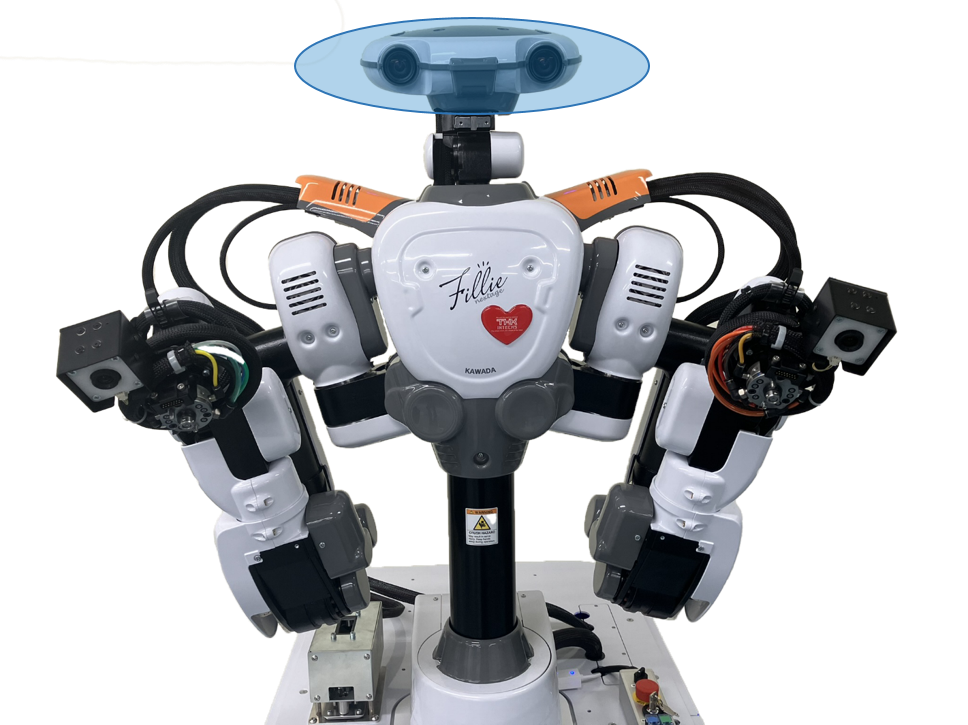
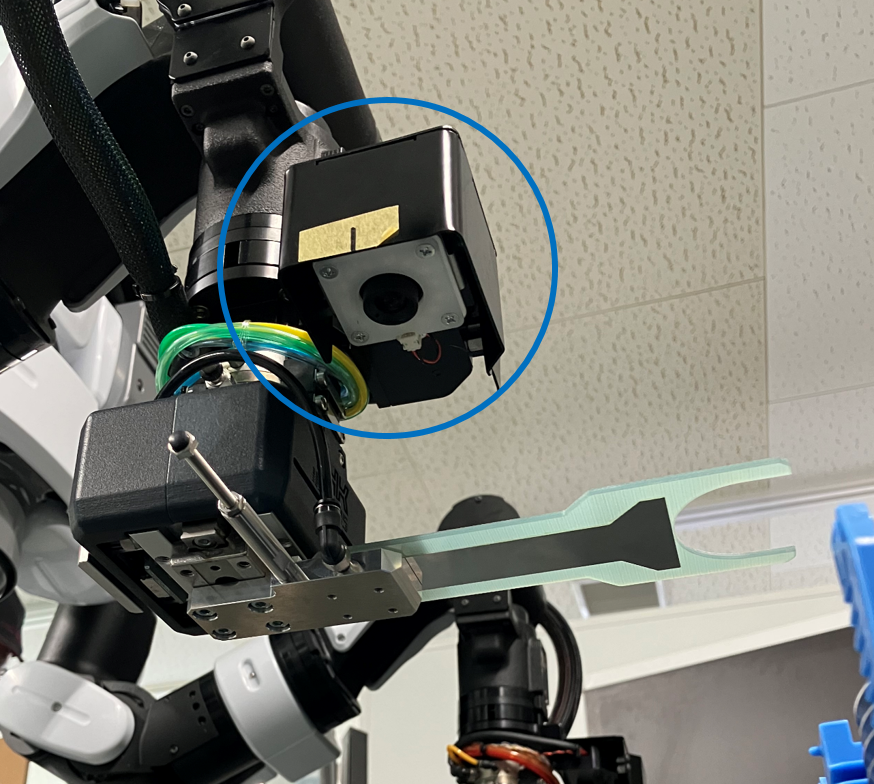
頭部:ステレオカメラと首振り
|
|
|
※マーカー認識による以下の確認と補正作業 |
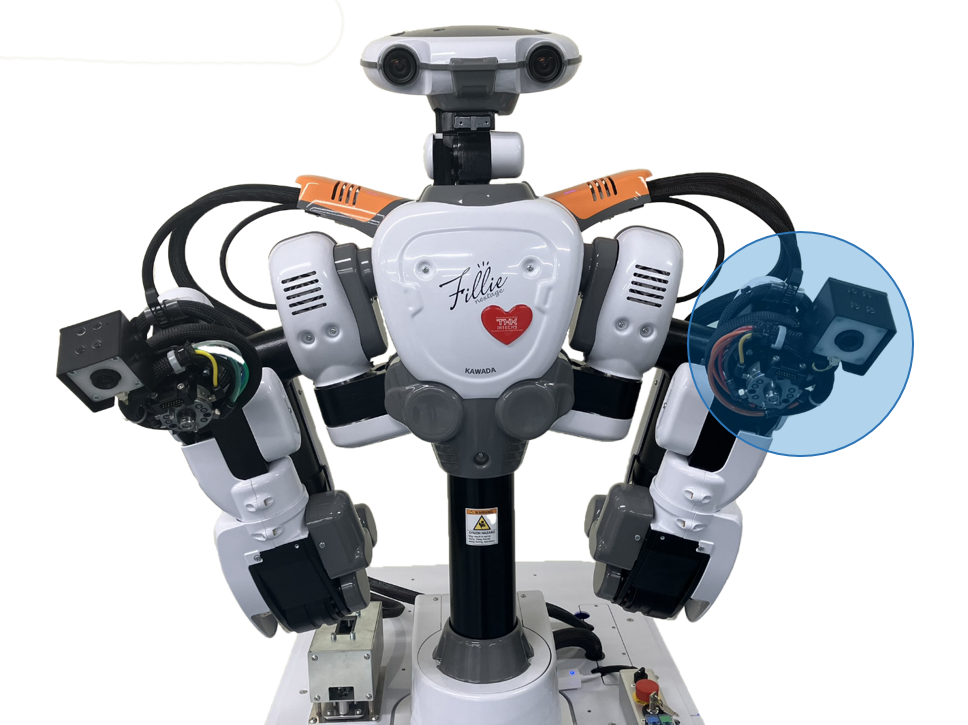
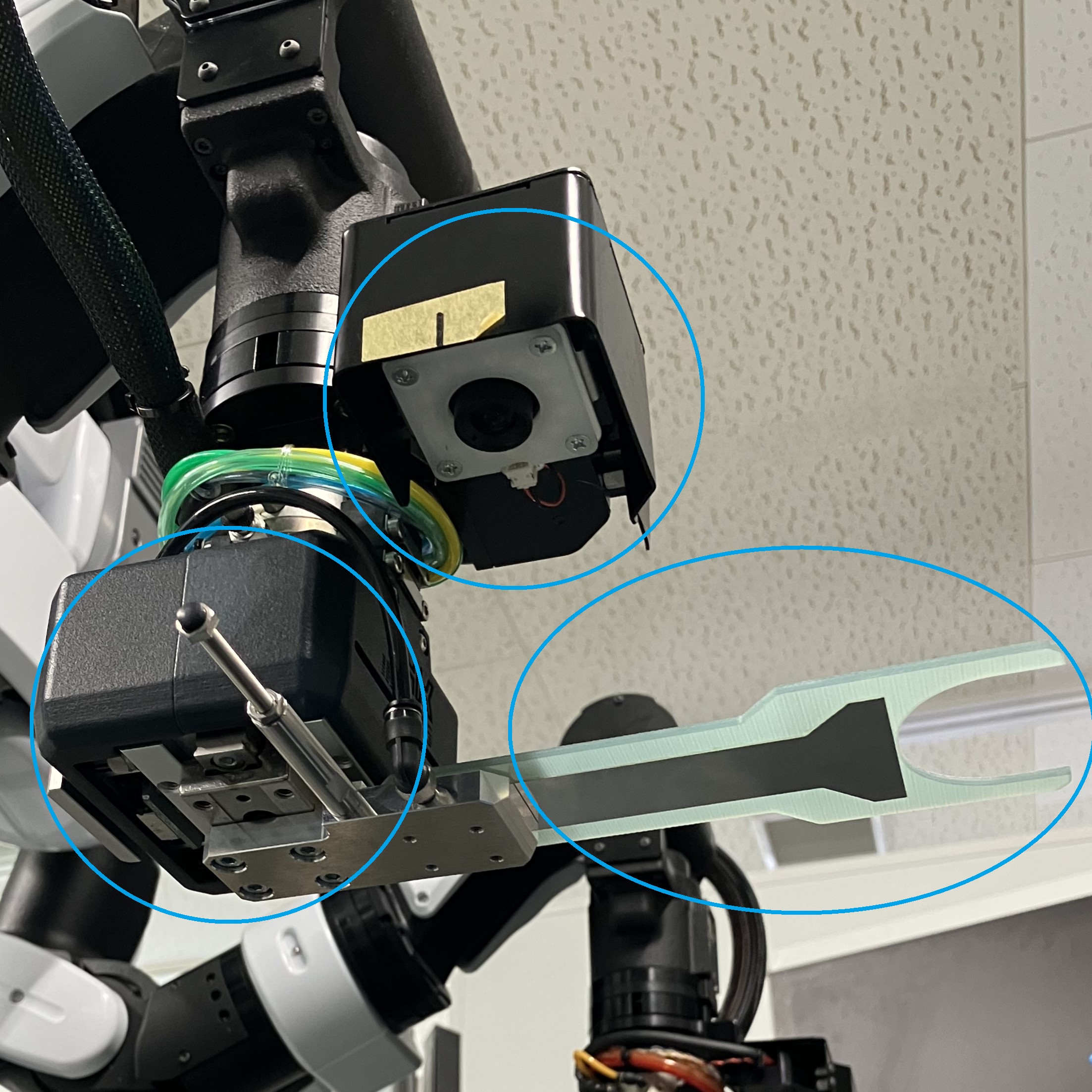
左腕部:ロボット左アーム
|
|
|
L1:ロボット左アーム |
||
|
L1:左アーム近接カメラ |
|
L1-1:ウェーハのオリフラ/重心位置の確認 |
|
L1-2:画像処理画面 |
|
L2:グリップ・ハンド |
|
L2-1:ステージドアをグリップして開閉 |
|
L2-2:ウェーハをエッジグリップ |


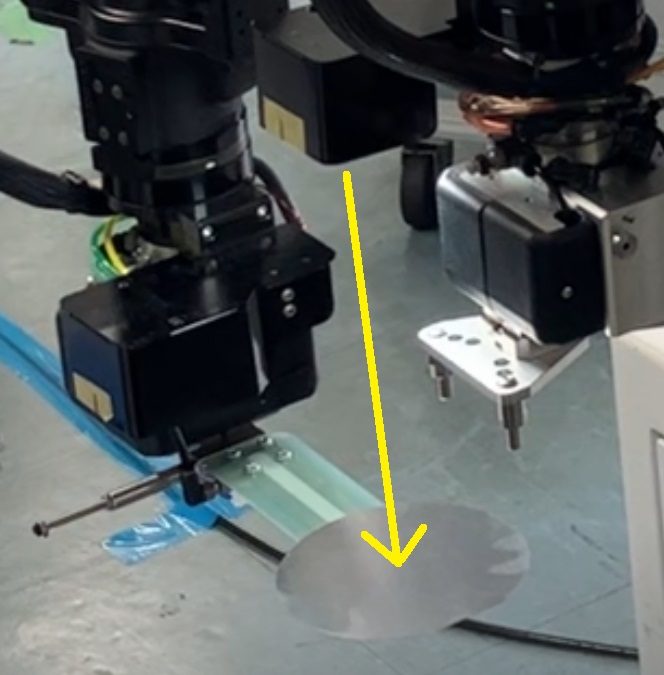



右腕部:ロボット右アーム
|
|
|
R1:ロボット右アーム |
||
|
R1:右アーム近接カメラ |
|
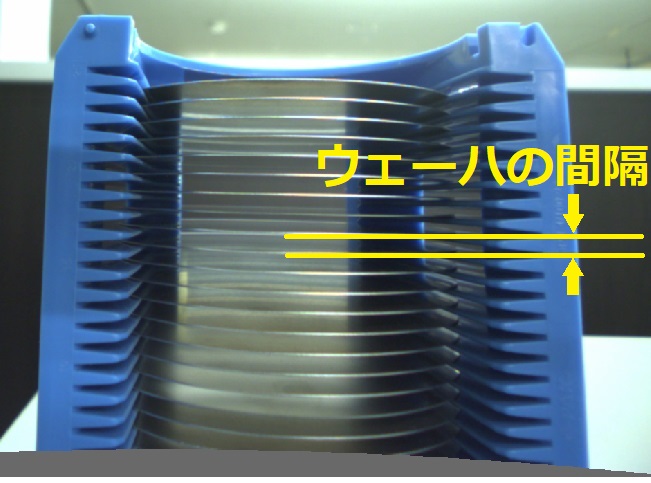
R1-1:ウェーハ間隔の確認(可能) |
|
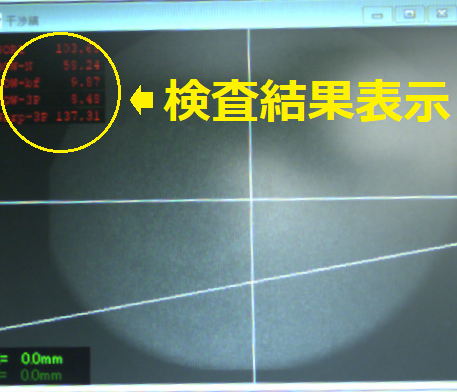
R1-2:画面の検査結果確認(可能) |
|
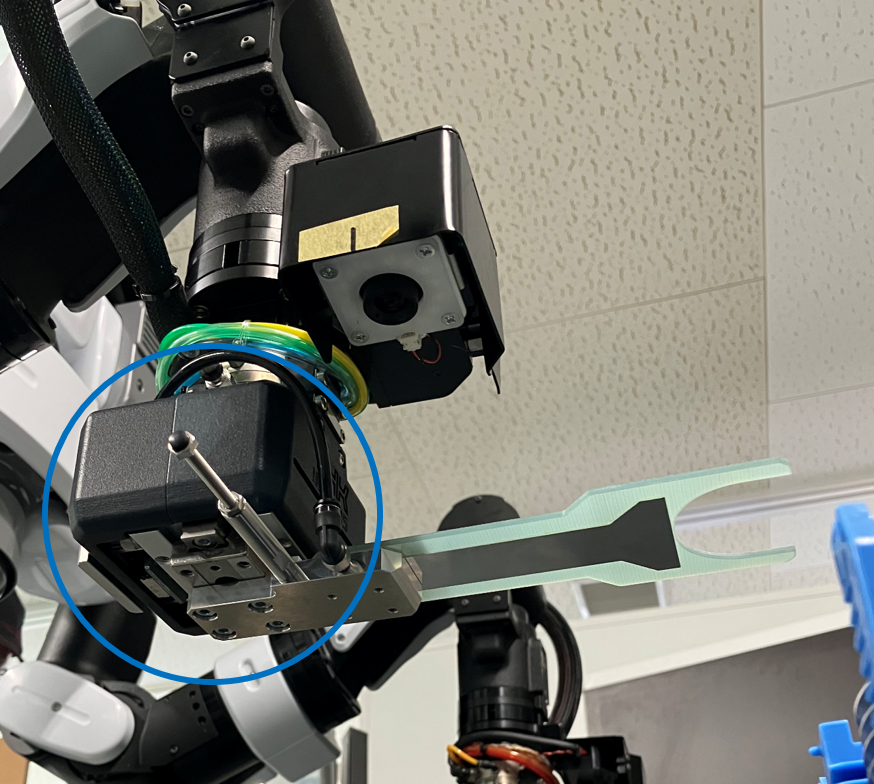
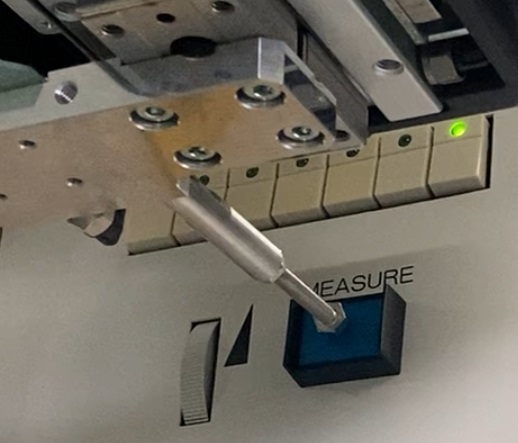
R2:スイッチ・プッシュアーム |
|
R2-1:ステージ・バキュームスイッチ |
|
R2-2:測定スタートスイッチ(可能) |
|
R3:ウェーハ吸着バンド(セラミックス製) |

注:(可能)→NEXTAGEに実装可能という意味を表しています。
|
ウエーハ検査ロボット 詳細動画① |
詳細動画② |
資料ダウンロード
|
 (2.5MB) (2.5MB) |
|---|
ロボット(産業・サービス)
産業用ロボット・サービス向けにご提案できる製品のご紹介です。
耐振動、耐屈曲、防水などの特殊なご要求にも対応できる製品のご提案も可能です。
主なアプリケーション
|